After implementing 2D image kernel, maybe now it’s time to implement matmul.
I suggest going ahead and implementing your Cuda version of Matmul. This one is going to be hard, so probably you’ll need some help from ChatGPT.
Here is my version:
__global__ void matmul_kernel_cache(float *out, const float *a, const float *b, int M, int N, int K){ int row = blockIdx.y * blockDim.y + threadIdx.y; int col = blockIdx.x * blockDim.x + threadIdx.x;
__shared__ float sA[TILE_WIDTH][TILE_WIDTH], sB[TILE_WIDTH][TILE_WIDTH]; if (row < M && col < N) { int numTiles = (K + TILE_WIDTH - 1) / TILE_WIDTH; float pVal = 0; for (int t = 0; t < numTiles; t++) { int A_row = row; int A_col = t * TILE_WIDTH + threadIdx.x; if (A_row < M && A_col < K) sA[threadIdx.y][threadIdx.x] = a[A_row * K + A_col]; else sA[threadIdx.y][threadIdx.x] = 0;
int B_row = t * TILE_WIDTH + threadIdx.y; int B_col = col; if (A_row < M && A_col < K) sB[threadIdx.y][threadIdx.x] = b[B_row * N + B_col]; else sB[threadIdx.y][threadIdx.x] = 0;
__syncthreads();
for (int j = 0; j < TILE_WIDTH; j++) pVal += sA[threadIdx.y][j] * sB[j][threadIdx.x]; __syncthreads(); } out[row * N + col] = pVal; }}This kernel is good for the start. But if you remember, we have a way to optimize it. Lowering memory bottleneck by transferring data in 4 bits.
__global__ void matmul_kernel_cache_coalescing(float *out, const float4 *a, const float4 *b_T, int M, int N, int K){ int row = blockIdx.y * blockDim.y + threadIdx.y; int col = blockIdx.x * blockDim.x + threadIdx.x;
if (row < M && col < N) { int K4 = (K + 3) / 4;
int numTiles = (K4 + TILE_WIDTH - 1) / TILE_WIDTH;
__shared__ float4 sA[TILE_WIDTH][TILE_WIDTH], sB[TILE_WIDTH][TILE_WIDTH]; float pVal = 0; for (int t = 0; t < numTiles; t++) { int a_kchunk = t * TILE_WIDTH + threadIdx.x; int b_kchunk = t * TILE_WIDTH + threadIdx.y;
if (a_kchunk < K4) sA[threadIdx.y][threadIdx.x] = a[row * K4 + a_kchunk]; else sA[threadIdx.y][threadIdx.x] = make_float4(0.f, 0.f, 0.f, 0.f);
if (b_kchunk < K4) sB[threadIdx.y][threadIdx.x] = b_T[col * K4 + b_kchunk]; else sB[threadIdx.y][threadIdx.x] = make_float4(0.f, 0.f, 0.f, 0.f);
__syncthreads();
for (int j = 0; j < TILE_WIDTH; j++) { float4 va = sA[threadIdx.y][j]; float4 vb = sB[j][threadIdx.x];
pVal += va.x * vb.x + va.y * vb.y + va.z * vb.z + va.w * vb.w; } __syncthreads(); } out[row * N + col] = pVal; }}Probably you’ve noticed that access pattern is different for B, that’s because we’re passing it the Transposed version. You’d ask why? Because we’re using float4, we’re moving over 4 consecutive floats. This won’t work for B that is access column-wise for matmul.
This is the code to apply Transpose to the matrix:
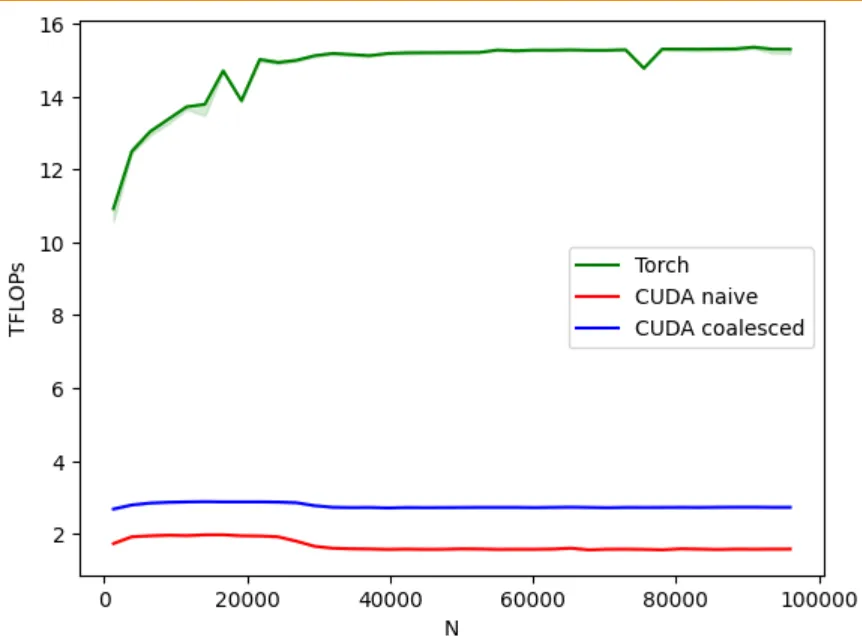
auto bT = b.transpose(0, 1).contiguous(); TORCH_CHECK(reinterpret_cast<uintptr_t>(bT.data_ptr<float>()) % 16 == 0, "Tensor B is not 16-byte aligned"); const float4 *b_T_ptr = reinterpret_cast<const float4 *>(bT.data_ptr<float>());You might think, that’s bulls eye. The performance now is going to be the best. I should break to you: NO. Performance is still bad, just slightly better. I think through the years of using MATMUL, just writing a randomly optimize kernel won’t cut it. You can check the performance in the following image:
I may get back to this subject, but would love to keep going forward.